如下图所示的矢量控制结构,我应该修改哪些关键变量?可以直接控制无刷电机的扭矩大小.理论上是 refValue = CTRL_getSpd_out_pu(handle);这个吗?还有其他变量吗?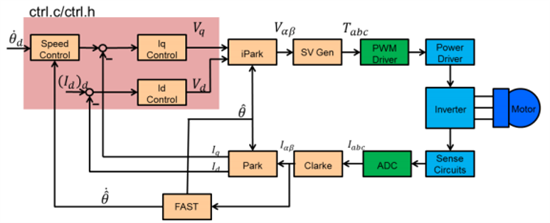
Martin Yu:
直接控制力矩的话,建议直接用力矩模式,用Motorware里面的Lab4例程,通过直接更改Iq的给定。
如下图所示的矢量控制结构,我应该修改哪些关键变量?可以直接控制无刷电机的扭矩大小.理论上是 refValue = CTRL_getSpd_out_pu(handle);这个吗?还有其他变量吗?
user4708725:
回复 Martin Yu:
我是要同时控制速度和扭矩,是否应该这么做呢?如果不这么做,电机的扭矩特别小。谢谢
如下图所示的矢量控制结构,我应该修改哪些关键变量?可以直接控制无刷电机的扭矩大小.理论上是 refValue = CTRL_getSpd_out_pu(handle);这个吗?还有其他变量吗?
Martin Yu:
回复 user4708725:
这样的话,Iq的给定是由速度环的输出,因此可以更改速度环的输出限值,还有需要调试电流环的PI参数。
如下图所示的矢量控制结构,我应该修改哪些关键变量?可以直接控制无刷电机的扭矩大小.理论上是 refValue = CTRL_getSpd_out_pu(handle);这个吗?还有其他变量吗?
user4708725:
回复 Martin Yu:
电流环的PI参数一般怎么整定可以使扭矩加大?非常感谢TI员工的耐心回答
如下图所示的矢量控制结构,我应该修改哪些关键变量?可以直接控制无刷电机的扭矩大小.理论上是 refValue = CTRL_getSpd_out_pu(handle);这个吗?还有其他变量吗?
Kancheng Huang:
回复 user4708725:
同时控扭矩和同时控速度本来就是矛盾的。速度闭环输出的就是扭矩。
调整电流环参数只不过是保证电流环的稳定和响应速度而已。
在速度闭环的情况下,增加力矩就是在硬件容许的范围内,提高最大电流限制就好了。
如果说你的电机表明10A可以提供0.5Nm但是实际上你10A只能得到0.25Nm,那是你的电流解耦做的不好。
如下图所示的矢量控制结构,我应该修改哪些关键变量?可以直接控制无刷电机的扭矩大小.理论上是 refValue = CTRL_getSpd_out_pu(handle);这个吗?还有其他变量吗?
ming chen3:
回复 user4708725:
Te-Tf-Tload = J* dw/dt
在额定功率下,电机速度达到平衡时,输出转矩等于负载转矩+摩擦转矩。
力矩环就是系统的带载能力。至于速度环下能出多大电流与负载相关。