-
看完ControlSuite里面的ILPFC实例,很受启发。但是有个问题想询问一下,程序中的补偿采用2p2z,那么参数是怎么得到的,是计算的还是经验法?如果根据系统的伯德图计算的,我想问一下,怎么得到的伯德图?如果是伯德图得来,根据伯德图计算出来的数据如何转换到程序中呢?
Martin Yu:
回复 Martin Yu:

这个文档里面有
看完ControlSuite里面的ILPFC实例,很受启发。但是有个问题想询问一下,程序中的补偿采用2p2z,那么参数是怎么得到的,是计算的还是经验法?如果根据系统的伯德图计算的,我想问一下,怎么得到的伯德图?如果是伯德图得来,根据伯德图计算出来的数据如何转换到程序中呢?
Martin Yu:
回复 Martin Yu:
这个文档里面有
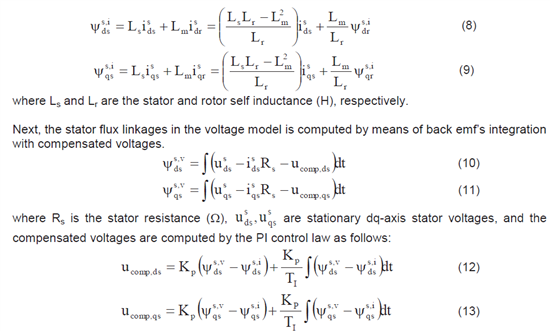 ACI_FE 模块原理性问题 异步电机电机控制
ACI_FE 模块原理性问题 异步电机电机控制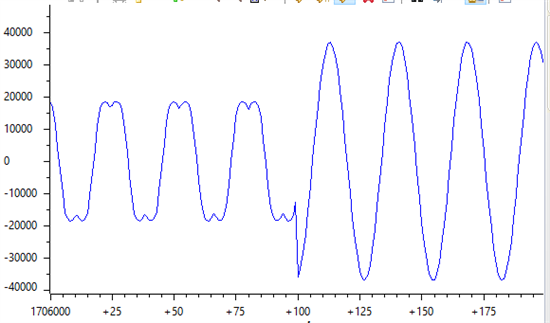 HVACI SVG波形错误
HVACI SVG波形错误 controlsuit里面的fir32例程拷出来 后准备在上面更改。才添加了一条语句就进了非法中断
controlsuit里面的fir32例程拷出来 后准备在上面更改。才添加了一条语句就进了非法中断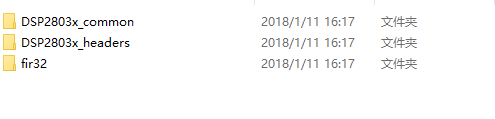 请问controlsuit拷出来的工程。设置了include路径,但是.C与.cmd路径不知道怎么设置,编译会报找不到文件。
请问controlsuit拷出来的工程。设置了include路径,但是.C与.cmd路径不知道怎么设置,编译会报找不到文件。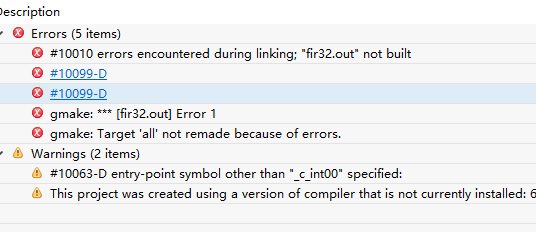 ContorlSUITE里面的CLA例程有错误,比如fir32例程。初学,根本改不好,请问哪里能下载到无错误的例程。
ContorlSUITE里面的CLA例程有错误,比如fir32例程。初学,根本改不好,请问哪里能下载到无错误的例程。 关于和DSP高压套件中QEP匹配的传感器问题关于DSP高压套件的连接问题(High Voltage Motor Control and PFC Developers Kit (v2.1))
关于和DSP高压套件中QEP匹配的传感器问题关于DSP高压套件的连接问题(High Voltage Motor Control and PFC Developers Kit (v2.1))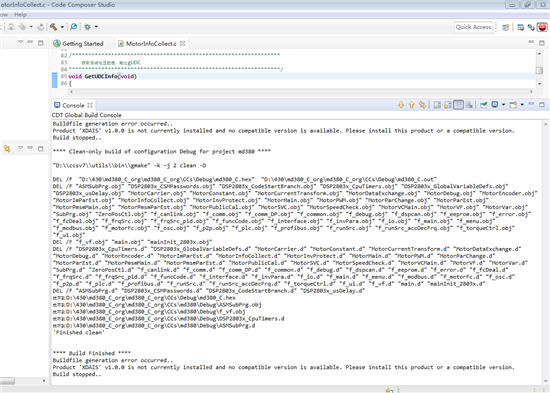 CCS V7版打开低版本的工程项目时,编译提示错误,请大神指教
CCS V7版打开低版本的工程项目时,编译提示错误,请大神指教