刚刚接触C2000的开发,想直接看TI提供的例程是怎样驱动电机旋转的,硬件电路已经搭好,采用例程controlSUITE\install\development_kits\HVMotorCtrl+PfcKit_v2.0\HVPM_Sensorless,不知哪个BUILDLEVEL可以时电机旋转,
#define LEVEL1 1 // Module check out (do not connect the motors) //这个等级电机不能接电机
#define LEVEL2 2 // Verify ADC, park/clarke, calibrate the offset //这个没有加入QEP模块,角度没有产生旋转的变化,三路PWM波生成不了正弦波
#define LEVEL3 3 // Verify closed current(torque) loop, QEP and speed meas.//这个等级是不是就可以使电机按照给定的转速旋转???
#define LEVEL4 4 // Verify close speed loop and speed PID //这个闭环的我还没调通,不知能否使电机按照给定的转速旋转??
请大虾们能解释下各个BUILDLEVEL的实际意图,我不是很理解??
Eric Ma:
rogers,
你调试之前应该细读这个实验套件的用户手册,如下目录,这个文档里面就有详细说明每个调试步骤都调试那些变量或信号,TI在实验套件上采用增量式编译的方式,就是让用户能够从开始到深入去理解整个应用。
C:\ti\controlSUITE\development_kits\HVMotorCtrl+PfcKit_v2.0\HVACI_Sensorless\~Docs\Sensorless FOC of ACI.pdf
Eric
刚刚接触C2000的开发,想直接看TI提供的例程是怎样驱动电机旋转的,硬件电路已经搭好,采用例程controlSUITE\install\development_kits\HVMotorCtrl+PfcKit_v2.0\HVPM_Sensorless,不知哪个BUILDLEVEL可以时电机旋转,
#define LEVEL1 1 // Module check out (do not connect the motors) //这个等级电机不能接电机
#define LEVEL2 2 // Verify ADC, park/clarke, calibrate the offset //这个没有加入QEP模块,角度没有产生旋转的变化,三路PWM波生成不了正弦波
#define LEVEL3 3 // Verify closed current(torque) loop, QEP and speed meas.//这个等级是不是就可以使电机按照给定的转速旋转???
#define LEVEL4 4 // Verify close speed loop and speed PID //这个闭环的我还没调通,不知能否使电机按照给定的转速旋转??
请大虾们能解释下各个BUILDLEVEL的实际意图,我不是很理解??
Young Hu:
在Level1马达就可以运行的,是开环运行的
刚刚接触C2000的开发,想直接看TI提供的例程是怎样驱动电机旋转的,硬件电路已经搭好,采用例程controlSUITE\install\development_kits\HVMotorCtrl+PfcKit_v2.0\HVPM_Sensorless,不知哪个BUILDLEVEL可以时电机旋转,
#define LEVEL1 1 // Module check out (do not connect the motors) //这个等级电机不能接电机
#define LEVEL2 2 // Verify ADC, park/clarke, calibrate the offset //这个没有加入QEP模块,角度没有产生旋转的变化,三路PWM波生成不了正弦波
#define LEVEL3 3 // Verify closed current(torque) loop, QEP and speed meas.//这个等级是不是就可以使电机按照给定的转速旋转???
#define LEVEL4 4 // Verify close speed loop and speed PID //这个闭环的我还没调通,不知能否使电机按照给定的转速旋转??
请大虾们能解释下各个BUILDLEVEL的实际意图,我不是很理解??
Rogers:
回复 Eric Ma:
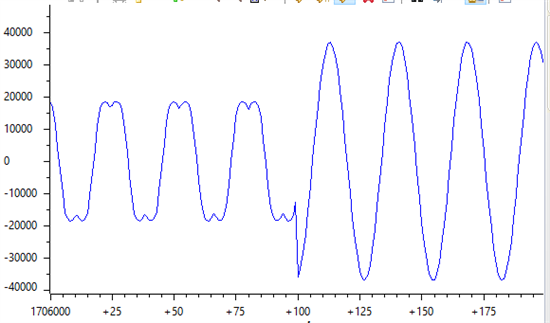
谢谢 确实之前没去看 但是在LEVEL1我用Graph看Ta,Tb,Tc的波形,并不是像文档里所说的都是类似正弦波,我出现的波形都是杂乱的,请问在LEVEL1有什么要使Ta,Tb,Tc的变化是正弦波,有什么要注意的和更改的吗?
刚刚接触C2000的开发,想直接看TI提供的例程是怎样驱动电机旋转的,硬件电路已经搭好,采用例程controlSUITE\install\development_kits\HVMotorCtrl+PfcKit_v2.0\HVPM_Sensorless,不知哪个BUILDLEVEL可以时电机旋转,
#define LEVEL1 1 // Module check out (do not connect the motors) //这个等级电机不能接电机
#define LEVEL2 2 // Verify ADC, park/clarke, calibrate the offset //这个没有加入QEP模块,角度没有产生旋转的变化,三路PWM波生成不了正弦波
#define LEVEL3 3 // Verify closed current(torque) loop, QEP and speed meas.//这个等级是不是就可以使电机按照给定的转速旋转???
#define LEVEL4 4 // Verify close speed loop and speed PID //这个闭环的我还没调通,不知能否使电机按照给定的转速旋转??
请大虾们能解释下各个BUILDLEVEL的实际意图,我不是很理解??
Young Hu:
回复 Rogers:
文档中的波形是基于TI的开发板测出来的,是有RC滤波,使用PWM实现DAC功能,才把这几个波形弄出来的
刚刚接触C2000的开发,想直接看TI提供的例程是怎样驱动电机旋转的,硬件电路已经搭好,采用例程controlSUITE\install\development_kits\HVMotorCtrl+PfcKit_v2.0\HVPM_Sensorless,不知哪个BUILDLEVEL可以时电机旋转,
#define LEVEL1 1 // Module check out (do not connect the motors) //这个等级电机不能接电机
#define LEVEL2 2 // Verify ADC, park/clarke, calibrate the offset //这个没有加入QEP模块,角度没有产生旋转的变化,三路PWM波生成不了正弦波
#define LEVEL3 3 // Verify closed current(torque) loop, QEP and speed meas.//这个等级是不是就可以使电机按照给定的转速旋转???
#define LEVEL4 4 // Verify close speed loop and speed PID //这个闭环的我还没调通,不知能否使电机按照给定的转速旋转??
请大虾们能解释下各个BUILDLEVEL的实际意图,我不是很理解??
Hongmin Li:
回复 Eric Ma:
您好,
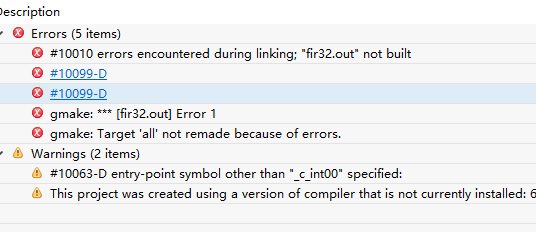
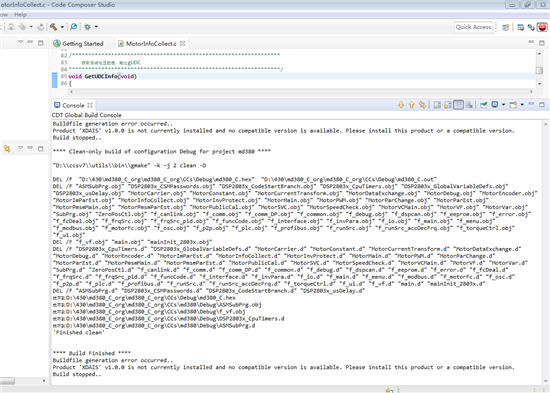
我在Setting.h文件中将BUILDLEVEL从LEVEL1改为LEVEL2之后,保存时显示Some characters cannot be mapped using"GBK" character encoding. Either change the encoding or reremove the characters which are not supported by the"GBK" character encoding.然后我就保存为UTF-8了,然后编译就出现了错误:
我再将LEVEL2改为1,错误有没有了,这是怎么回事?
刚刚接触C2000的开发,想直接看TI提供的例程是怎样驱动电机旋转的,硬件电路已经搭好,采用例程controlSUITE\install\development_kits\HVMotorCtrl+PfcKit_v2.0\HVPM_Sensorless,不知哪个BUILDLEVEL可以时电机旋转,
#define LEVEL1 1 // Module check out (do not connect the motors) //这个等级电机不能接电机
#define LEVEL2 2 // Verify ADC, park/clarke, calibrate the offset //这个没有加入QEP模块,角度没有产生旋转的变化,三路PWM波生成不了正弦波
#define LEVEL3 3 // Verify closed current(torque) loop, QEP and speed meas.//这个等级是不是就可以使电机按照给定的转速旋转???
#define LEVEL4 4 // Verify close speed loop and speed PID //这个闭环的我还没调通,不知能否使电机按照给定的转速旋转??
请大虾们能解释下各个BUILDLEVEL的实际意图,我不是很理解??
Eric Ma:
回复 Hongmin Li:
”我在Setting.h文件中将BUILDLEVEL从LEVEL1改为LEVEL2之后,保存时显示Some characters cannot be mappedusing"GBK" character encoding.
Either change the encoding or reremove the characters which are not supported by the"GBK" character encoding.然后我就保存为UTF-8了,然后编译就出现了错误:“
Eric:
你看看console里面具体的编译信息才知道是什么错误。
一般保存字体的这种改变是通常是在注释里面的字,不会影想编译的。