程序在运行时电流控制环的Kp这个参数为什么会跳变?
它应该只是根据电机参数在初始化时赋值一次,然后在控制程序中根据母线电压进行实时的调整。如果我的母线电压没有发送变化,电流控制环的Kp应该是稳定的才对。但在程序的控制过程中,电流环的Kp参数会在初始化值和经过母线电补偿后的值之间跳动。电机运行是正常的。
在程序中我没有找到会再重新对PI参数进行初始化的地方,所以不明白为什么程序运行过程中Kp会在初始化值和经过母线电压补偿后的值之间跳动。是我程序中根据母线电压对Kp的修改只能在PI控制程序中生效?结束PI控制后又恢复到初始值?但程序是对指针值进行修改,而且观测的为全局变量,修改值应该是一直生效的啊?
求各位大佬帮忙解惑,谢谢了!
Seven Han:
请问您使用的是TI的evm板还是自己设计的板子?
程序在运行时电流控制环的Kp这个参数为什么会跳变?
它应该只是根据电机参数在初始化时赋值一次,然后在控制程序中根据母线电压进行实时的调整。如果我的母线电压没有发送变化,电流控制环的Kp应该是稳定的才对。但在程序的控制过程中,电流环的Kp参数会在初始化值和经过母线电补偿后的值之间跳动。电机运行是正常的。
在程序中我没有找到会再重新对PI参数进行初始化的地方,所以不明白为什么程序运行过程中Kp会在初始化值和经过母线电压补偿后的值之间跳动。是我程序中根据母线电压对Kp的修改只能在PI控制程序中生效?结束PI控制后又恢复到初始值?但程序是对指针值进行修改,而且观测的为全局变量,修改值应该是一直生效的啊?
求各位大佬帮忙解惑,谢谢了!
deping long:
回复 Seven Han:
使用的是自己的板子,请问这个对于Kp有什么影响吗?
程序在运行时电流控制环的Kp这个参数为什么会跳变?
它应该只是根据电机参数在初始化时赋值一次,然后在控制程序中根据母线电压进行实时的调整。如果我的母线电压没有发送变化,电流控制环的Kp应该是稳定的才对。但在程序的控制过程中,电流环的Kp参数会在初始化值和经过母线电补偿后的值之间跳动。电机运行是正常的。
在程序中我没有找到会再重新对PI参数进行初始化的地方,所以不明白为什么程序运行过程中Kp会在初始化值和经过母线电压补偿后的值之间跳动。是我程序中根据母线电压对Kp的修改只能在PI控制程序中生效?结束PI控制后又恢复到初始值?但程序是对指针值进行修改,而且观测的为全局变量,修改值应该是一直生效的啊?
求各位大佬帮忙解惑,谢谢了!
Seven Han:
回复 deping long:
您指的是哪个lab project?
如果是lab02~lab10,在 ctrl.h文件中的CTRL_runOnLine_User() 函数;
程序在运行时电流控制环的Kp这个参数为什么会跳变?
它应该只是根据电机参数在初始化时赋值一次,然后在控制程序中根据母线电压进行实时的调整。如果我的母线电压没有发送变化,电流控制环的Kp应该是稳定的才对。但在程序的控制过程中,电流环的Kp参数会在初始化值和经过母线电补偿后的值之间跳动。电机运行是正常的。
在程序中我没有找到会再重新对PI参数进行初始化的地方,所以不明白为什么程序运行过程中Kp会在初始化值和经过母线电压补偿后的值之间跳动。是我程序中根据母线电压对Kp的修改只能在PI控制程序中生效?结束PI控制后又恢复到初始值?但程序是对指针值进行修改,而且观测的为全局变量,修改值应该是一直生效的啊?
求各位大佬帮忙解惑,谢谢了!
deping long:
回复 Seven Han:
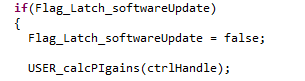
这是Kp第一次初始化的位置,这部分程序只执行一次:
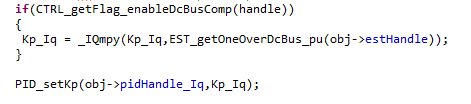
这是PI控制前通过母线电压补偿时重新计算Kp的位置:
我用watchwindows观察程序运行时Iq的PI控制的各个量:
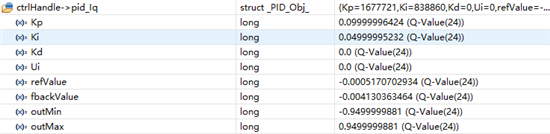
发现程序运行过程中watchwindows中的Kp值会在第一次初始化值和经过母线电压补偿后的值之间跳变。但我在主循环和主中断中并没有找到另外其他的对Kp进行初始化的程序,所以按理来说只要我母线电压没有变,Kp值就应该保持在母线电压补偿值左右小范围波动,而不是在初始化值和补偿值这两个值之间跳变。
一直没想清楚这一点的原因,希望您能帮忙解答下,谢谢了。
程序在运行时电流控制环的Kp这个参数为什么会跳变?
它应该只是根据电机参数在初始化时赋值一次,然后在控制程序中根据母线电压进行实时的调整。如果我的母线电压没有发送变化,电流控制环的Kp应该是稳定的才对。但在程序的控制过程中,电流环的Kp参数会在初始化值和经过母线电补偿后的值之间跳动。电机运行是正常的。
在程序中我没有找到会再重新对PI参数进行初始化的地方,所以不明白为什么程序运行过程中Kp会在初始化值和经过母线电压补偿后的值之间跳动。是我程序中根据母线电压对Kp的修改只能在PI控制程序中生效?结束PI控制后又恢复到初始值?但程序是对指针值进行修改,而且观测的为全局变量,修改值应该是一直生效的啊?
求各位大佬帮忙解惑,谢谢了!
deping long:
回复 Seven Han:
忘说了,我用的是lab20。



![TMS320F28379D: 导入例程出现故障Description Resource Path Location Type gmake: *** [gridconnectedinvlclfltr.obj] Error 1 gridConnectedInverterLCLFltr C/C++ Problem-TI中文支持网](https://www.ti2k.com/wp-content/uploads/ti2k/DeyiSupport_C2000_pastedimage1752114958744v1.jpg)

